WB 37
Constructions




Primary function: Picking up the apple.
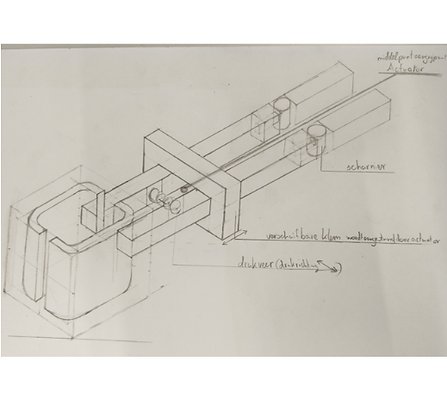
The two beams can both turn around a point on the arm and a spring is pushing them outwards. To keep the beams together there is a wooden frame around the beams. This frame can be moved back and forth by an actuator. If the frame is pushed forward the claw will close, if the frame is pulled backwards the claw will open.
The problem with this design is that we need a long arm to pick up big apples. On the other hand, if we made the claw bigger to be able to pick bigger apples, we would have a problem with smaller apples.
Primary function: Bringing the claw to the apple.
The arm works by moving the two bars at one end of the arm closer to each other. This will cause the arm to extend. If you move the two bars away from each other the claw will retract.
The problem with this idea is that as soon as the claw picks up the apple the arms will bend. This causes the movement to be stiff and jerky.
Primary function: Picking up the apple.
An actuator is attached to the back of the claw and can extend and retract. When the actuator extends, the claw will open and if the actuator retracts the claw will close.
We have chosen this design because it has a large surface area where the claw touches the apple. This causes the force with which the claw is closing to be divided over a larger area, which makes sure the apple is less likely to be damaged. The claw is also wider at the top then at the bottom. This makes sure that an apple fits better in the claw, because the form of most apples is wider at the the top and smaller at the bottom.
Morphological map


Primary function: Turning the mechanims.
The rotating disc is standing on a bearing which causes the mechanisme to be able to turn. Also there is a hinge attached to the disc which is connected to the actuator. If the actuator extends or retracts the disc will turn.
We have chosen this idea because it works the best with the rest of the robot. The reason the disc works better then a rail is because a rail would mean moving the entire robot and turning it on the disc takes less force then moving the robot.
Primary function: Bringing the claw to the apple.
An actuator is attached to the arm which can move the arm up and down by extending and retracting.
The reason we have chosen this arm is because the arm has no moving parts, the arm does not extend or turn. this makes it really easy to build the arm and attach the actuator to it. There was also a lot of room to attach the claw to the arm which makes assembling the robot easier.






One of the tables with criteria we used for the design process.
Design Choices





Primary function: Picking up the apple.
The claw works by extending the arm to the apple. When the arm is fully extended the lowest rope will be pulled off the claw, which will make the claw close. Because the lowest rope is not connected to the claw anymore the arm will retract. At the same time the other rope will make the machine turn. Because the machine turned, the top rope will come under tension. This makes the arm extend again. At the moment the arm is fully extended, the claw will open and drop the apple.
The problem with this claw is that it is very difficult to assemble. If we want to assemble the machine in less than five minutes working with the ropes, those would have to be a specific length and have to be carefully setup in a specific way with a small margin of error, which makes it very difficult to assemble easy.
Primary function: Picking up the apple.
The actuator is attached to a hinge. When the actuator extends the claw will open and if the actuator retracts the claw will close.
The problem with this claw is that it does not open all that far. This is because it is made in a V shape. The claw is also very big and consists of a lot of beams. This makes the claw harder to develop and heavier to lift.
These were some other design drawings we had in the early stages of developing the robot.
Primary function: Picking up the apple.
The actuator opens the claw by extending, with help of the two rubber bands. The bands are pulled to the left and will cause the claw to open. When the claw has to close the actuator retracts and closes the claw with help of the middle rubber band. The rubber bands help the claw open and close. Because of this we can use less bar.
The final design looks like this design only without the rubber bands. The rubber bands were not needed because the amount of bar over the entire machine was higher than the amount we needed at minimum for the claw to work properly. Also the amount of bar is not as high that the claw would damage the apple.
Primary function: Picking up the apple.
The claw can open and close in the same way a scissor works.
We didn’t use this idea because we found the claw we actually used to be much easier to connect to the actuator. The other reason we didn't use this design is because this claw only has one point on either side where it touches the apple and the design we used formed a kind of basket which divides the force of the claw on the apple over a larger surface area, making the apple less likely to be damaged. Also, the claw had to be al lot bigger to let the actuator fit in itself (yellow/red piece stands for the actuator).

Primary function: Picking up the apple.
The actuator is attachted to a hinge. When the actuator retracts, the hinge will retract and the claw will close. When the actuator extends the hinge will strech and the claw will open. The rubber bands prevent damage to the apple and provide extra grip.
Our final design looks like this design, the difference is we used a piece of PMMA instead of a hinge. A hinge can strech too far, our piece cannot. Also, the piece of PMMA was lasered which improves the accuracy.

Primary function: Moving the machine.
The actuator extends and pushes the machine along the rails.
The problem with this design is that the actuator only extends 10 cm which is not enough to get the machine past the wall and to the middle of the other platform. If we wanted to use this idea we had to come up with a way to make the machine move more then the stretch of the actuator which would have made the design more complicated and harder to assemble.
Primary function: Picking up the apple.
The claw can close bymoving the red bar down, the parallel yellow bar is fixed to the frame and as a result does not move. If the claw needs to open, the red bar is pushed upwards. The difference between this claw and the previous claw is that only one side moves to grab the apple.
We did not use this design because we were afraid that the claw would extend to far while opening and would hit the wall. Also we thought the design we used to be easier to put the actuator in place. here it would have to come from the side, with the used design it could be installed in the machine.

After testing, one of the panels connecting the arm to the claw broke. We were prepared for such problems with a spare part. The following statements conclude how this disaster happenend.
1) [The force in the arm] During the calculations of the verticle force that the actuator should have provided, we neglected the fact that the force that causes it to come down was as large as the one to lift the arm. Therefore the impact of the arm on the table was absorbed by the claw what caused it to break.
2)[The thickness of the connection] The plane which connected the claw to the arm did not have enough surface to absorb the force of impact. We spared some in the middle what would make it lighter. We did thit in the form of our logo WB37. As you can see in the picture, the panel broke at the top of 37 where the connecting elements is at its minimum. We could have prevented this by not cutting out this part or making the connection thicker.
3)[The plane has to absorp the complete force] In our design you can see that our claw is only connected to the arm at two certain points. This was the cause that the force of the move downwards had to be absorbed by the plane. A possible solution would have been longer screws that connected the two seperate panels to eachother with the claw inbetween.
Final thoughts